【北九州工業高等専門学校CPS共同研究室】
産学連携で取り組む次世代技術の開発
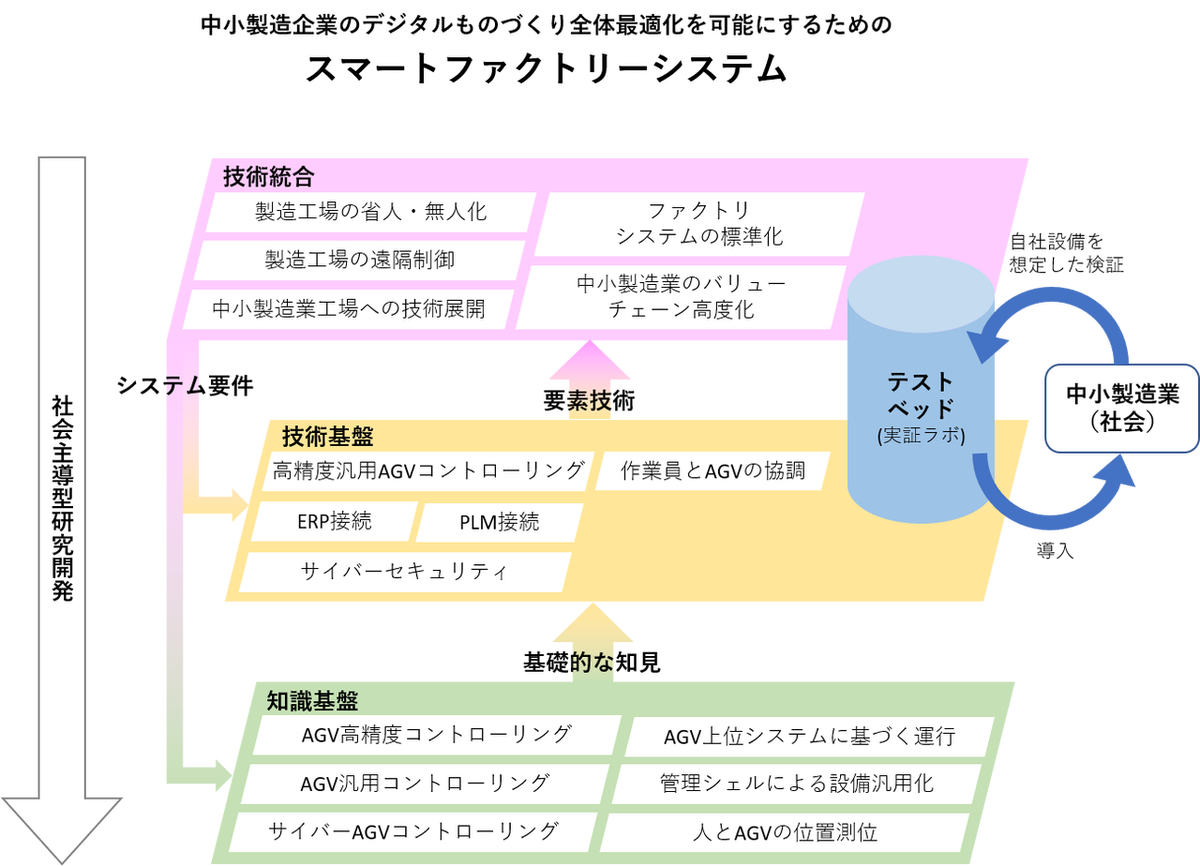
本研究計画では、製造業をはじめとして大きなパラダイムシフトをもたらすDXおよび第4次産業革命に様々な面で対応できる強固な基盤を構築するため、米国科学財団(National Science Foundation:NSF)が支援する工学研究センター(Engineering Reaserch Centers:ERC)が提唱するシステムズアプローチを基軸に据えます。下図は、本事業の3階層アーキテクチャによる研究活動のシステム化を示したものです。
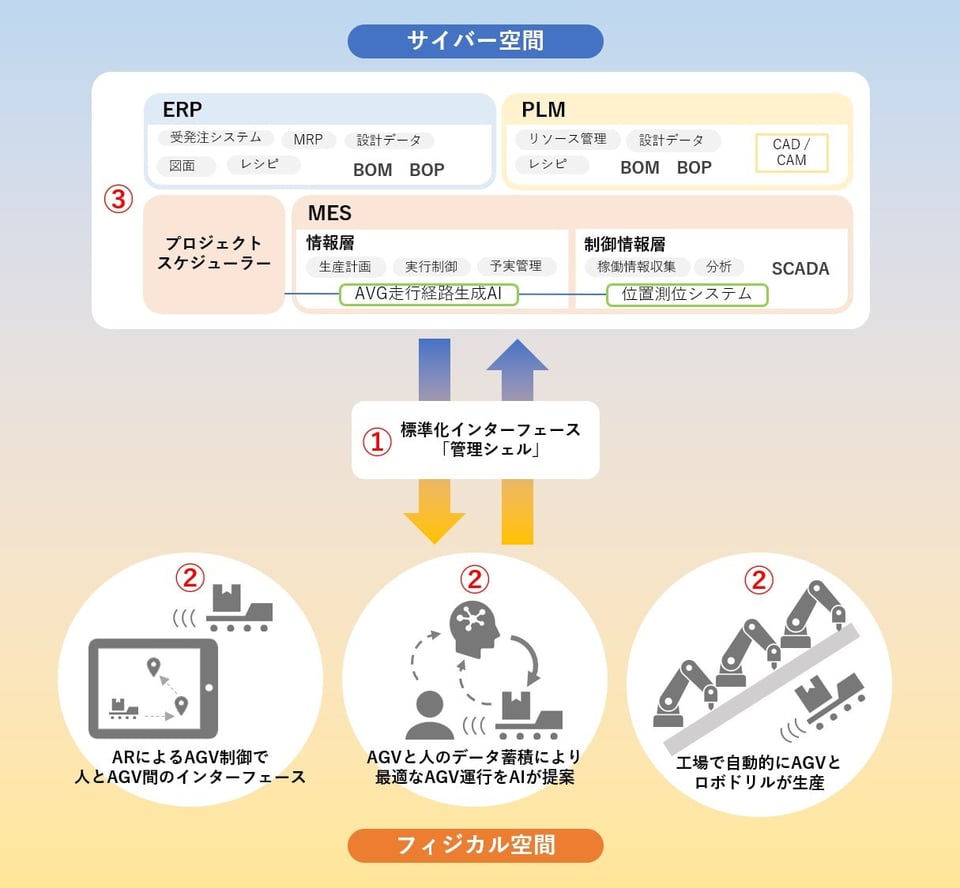
無人搬送車は、単なる搬送タイプのみの用途でなく、エンジニアリングチェーンとサプライチェーンの交点を担う製造実行システムとの連携による多品種変量生産に適した多能工ロボットシステムへのシフトチェンジが求められています。
そこで本研究開発では、中小製造業のバリューチェーンの高度化を支援するため、国際標準化管理手法に基づき、無人搬送車・製造実行システム・基幹統合管理システムを接続します。
更に実工場へ技術移転を実現するため、スマートなマザー工場での段階的な実証実験により社会実装に直結した生産システムの研究開発を行います。事業化を本格化させるための無人搬送車と生産管理システムが接続された生産全体最適システムです。
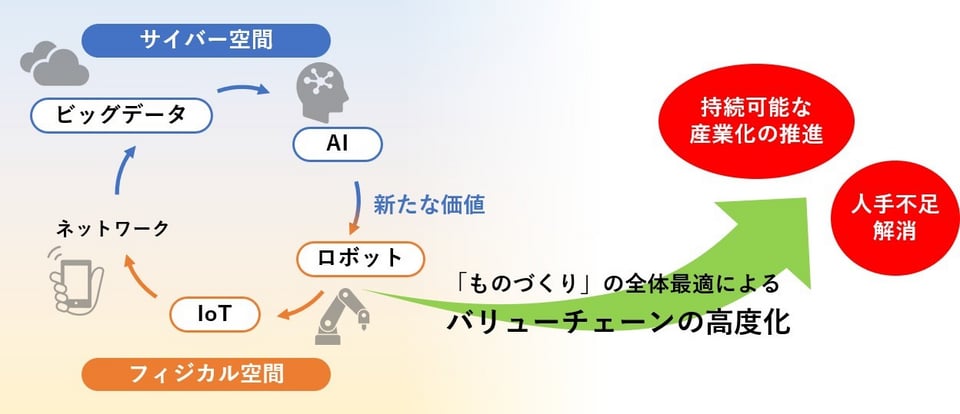
「産業創造」と「社会変革」に向けた新たな価値創出のための取り組みであるSociety5.0では、サイバー空間とフィジカル空間を高度に融合させ、「ものづくり」の全体最適によるバリューチェー ンの高度化を図ることで、持続可能な産業化の推進や人手不足解消に向けた目標が掲げられています。
この目標が掲げられたことにより、近年の製造業においては、第4次産業革命が提唱するユーザーの多様化による多品種化とタイムリーな受注生産方式の需要が急速な広がりを見せています。
本研究計画では、多能工ロボットシステムへのシフトチェンジの実現に向け、下記を行います。
AGVの走行・操作機能高度化と国際標準規格に基づく汎用化、上位システムとの接続性を特徴として、更に、中小製造業が課題とする実用化検証までのサポートを行う産学官連携で取り組む国内中小製造業のバリューチェーン高度化に大きく寄与する生産システムです。